Meet the Team




press → to reveal team
Problem Outline
Real-time custom advertising for event livestreams, to integrate with personalized recommendation systems.
- Develop a real-time ROI tracking system for tennis matches.
- Detect advertisement boards and replace them with dynamic ads.
press → to highlight target region
Original broadcast footage sample
Key Challenges
Core technical hurdles we need to solve for reliable, real-time ad replacement.
Existing Approaches & Landscape
COMMERCIAL SYSTEMS
Supponor (NHL DED)
IR strips in dasherboards + AI keying. $1.28B ad revenue (2023-24). Requires proprietary hardware at every venue.
uniqFEED (AdApt)
Software-based, deployed at major tennis events. Requires trained operators and custom-trained CV models per sport.
Vizrt / Viz Arena
Camera tracking hardware (encoder heads). Real-time but hardware-dependent and operator-intensive.
ACADEMIC WORK
Homography estimation — focused on soccer field registration (Nie et al. WACV 2021, Homayounfar CVPR 2017). Not applied to ad replacement.
SAM 2 in sports — used for ball tracking and player tracking. Not applied to advertisement board segmentation.
Virtual ad insertion research — soccer-only, predates foundation models, uses hand-crafted features.
KNOWN CHALLENGES
Jittering
Overlay instability across frames — tracking drift causes visible shaking in replaced banners.
Occlusion
Players walking in front of banners cause artifacts — overlays render on top of or through players.
Speed
Processing speed below real-time thresholds, limiting viability for live broadcast scenarios.
No prior work combines foundation model segmentation with classical CV for end-to-end sports ad replacement.
Each component exists individually — the pipeline does not.
Why This Combination is Novel
Foundation models (SAM 2) eliminate the need for hardware, custom training, and continuous operators for the segmentation problem. The remaining challenges — perspective geometry, compositing, occlusion — are solved with specific classical CV techniques.
Stable Tracking
Homography fitting combined with optical flow produces consistent overlays with minimal jitter across frames.
Occlusion Handling
Dedicated player segmentation pass generates per-pixel masks, allowing overlays to render correctly behind players.
Targeting 30 fps
Early results suggest real-time performance is achievable with GPU acceleration. Benchmarks in progress.
No prior work assembles this specific pipeline — zero-shot segmentation + classical CV geometry + per-pixel occlusion handling.
Project journey
How we got from the midterm-era manually-clicked corners to a pipeline that tracks the camera through a player walkover. Phase 2 failed; Phase 3 worked. The simpler answer won on visual review.
V68 · clicked corners
- Manually clicked court corners on a seed frame
- Static homography across all 767 frames
- 5 placements live: 3 back banners + left + floor
hybrid_lock + line-based estimator
- Per-frame Hough+RANSAC court detection
- 7 tolerance sweeps · 3 ramp speeds
- Gated by hybrid_lock state machine
BallTrackerNet learned-keypoint port
- 14-channel CNN court-keypoint detector
- RANSAC over 14 keypoints → homography
- ~50 H200 runs across 14 iteration waves
P3-A1 · what we ship
- V68 manually-clicked corners (seed)
- BTN dynamic homography · hybrid_lock@30
- V68 compositor unchanged, none of the experimental tweaks
How We Compare
| System | Hardware | Training | Operators | Occlusion | Stability | Latency |
|---|---|---|---|---|---|---|
| Supponor (NHL) | IR strips | Proprietary | Central hub | No (clipping) | High | Real-time |
| uniqFEED | None | Custom CV | Trained ops | Partial (bbox) | High | Near real-time |
| Vizrt / Viz Arena | Camera HW | Required | Required | Partial (bbox) | High | Real-time |
| MELIC (Prior) | None | Custom | Manual | Limited | Jittering | Below real-time |
| This Pipeline | None | None (SAM 2) | 1 click | Per-pixel masks | Stable | 2.68 fps (H200)* |
Fully software-based · Zero training · Minimal operator input · Per-pixel occlusion · Stable tracking
* Measured end-to-end on H200, 767-frame demo clip; ~30 fps real-time target is future work
Full Pipeline Overview
SAM2 model
We use Meta's SAM 2 as the backbone for banner segmentation: it requires Manual ROI selection on frame 0 — a single click, box, or mask prompt — and then tracks and segments the region across all subsequent frames.
- Pre-trained on SA-1B dataset (11M images, 1B+ masks),trained on SA-V video dataset (50.9K videos,35.5M masks)
- Prompt with points, boxes, or masksMemory bank for temporal consistency
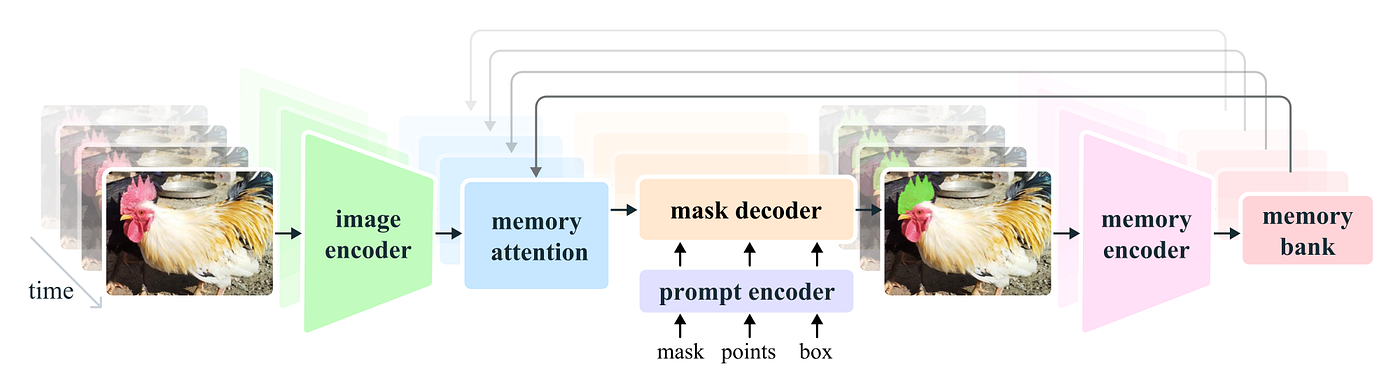
SAM 2 Architecture — Meta AI, “SAM 2: Segment Anything in Images and Videos” (arXiv:2408.00714)
Player
Segmentation
Detect and segment players on the court to ensure overlaid banners render behind them, preserving a natural viewing experience.
Banner Segmentation
& Tracking
Detect advertising banners across different regions of the court — ground-level boards, back wall panels, net-mounted banners, umpire stand signage, and more.
SAM2 - Banners Segmentation
- Banners Stable Camera
- Banners Moving Camera
- Logos Stable Camera
- Logos Moving Camera
- Camera Cutsexperiment
SAM3 model
SAM 3 introduces Promptable Concept Segmentation: given a text prompt or positive/negative exemplar prompts, it detects, segments, and tracks all instances of a concept across video frames, enabling automatic ROI detection and tracking.
- Text-prompted open-vocabulary detection
- New Detector head + SAM 2 Tracker + Memory Bank
- Detects new instances mid-video, no per-frame clicks
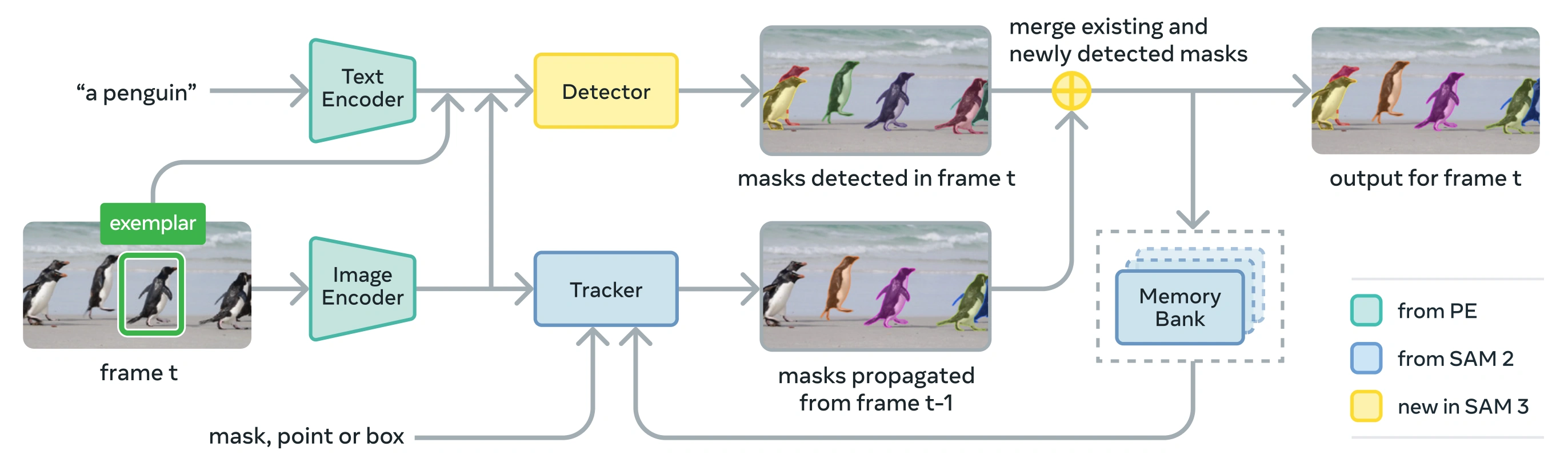
SAM 3 Architecture — Meta AI, “SAM 3: Segment Anything with Concepts” (arXiv:2511.16719)
SAM3-Light
A light version that runs SAM 3 (Detector + Tracker) only when the scene actually changes, and reuses the previous masks (Tracker) otherwise. This brings throughput from ~1 fps (full SAM 3) to ~3–4 fps on the same A100-80GB hardware.
SAM3 - Automatic detection
- Static
- Zoom + camera change P1
- Zoom + camera change P2
- Static
- Zoom + change (sim=0.85)
- Zoom + change (sim=0.95)
- Zoom + change (sim=0.97)
prompt “logo”
Full Pipeline Experiments
- SAM 3
- SAM 3-Light
- SAM 3-Lightexperiment
prompt “sponsor logo on fixed advertising board”
segmented objects 10
Homography &
Perspective Geometry
Understand the geometry and perspective of the banners from the camera's viewpoint so that overlays and modifications appear realistic to the viewer in the final livestream.




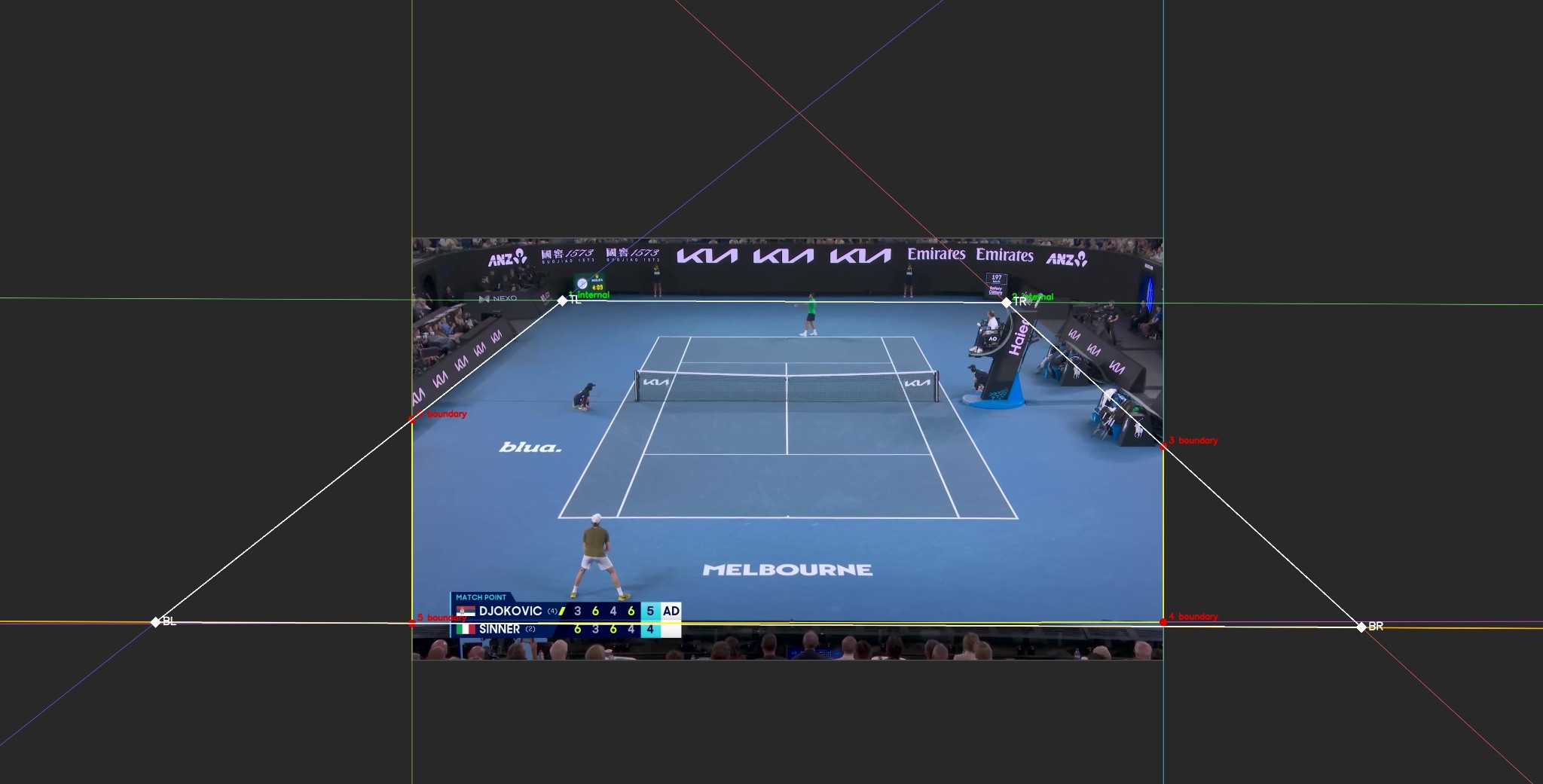
Vanishing
Point
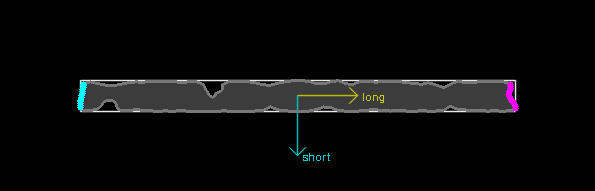
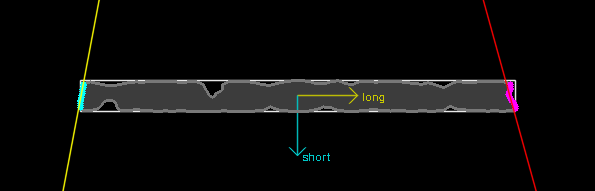
The vanishing point constrains how banner edges converge — it's not a true parallelogram but a perspective quadrilateral.
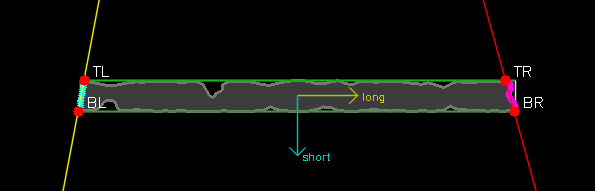
Quadrilateral
Fitting
- Original frame
- SAM mask
- Binary mask
- Min-area rectangle
- Split along axes
- Fit edge lines
- Intersect corners
- Rectified view




Single vanishing point
Before the BallTrackerNet learned-keypoint detector, the per-frame court geometry ran on a classical line-based estimator: Hough lines on court markings → cluster by orientation → estimate the depth vanishing point → fit the homography.
VP-constrained fitters
Wall banners and side panels are fitted with rays projecting from the depth or width vanishing point, gives geometrically correct perspective without solving full intrinsics.
Why it didn't make the final
The Hough estimator is frame-to-frame noisy, even with smoothing, projected corners deviate 5–15 px between frames on a static camera. Phase 2 swept
tolerance_px ∈ {2..30}under hybrid_lock; only the always-locked V68 baseline passed all gates.Path forward
Learned 14-keypoint detector (BallTrackerNet) replaces the Hough+VP estimator in the final. VP-constrained fitter code lives onfeat/court-geometry-stabilisation.
depth VP estimated from court markings
New logo overlay
- InpaintRemove the original logo from the surface (median_fill, temporal)
- LED-blend brightness re-bakeMatch local surface luminance, read as painted, not pasted
- Person-mask occlusionAlpha-matte the player silhouette so logos hide behind feet, legs, racket
- 01Original broadcast
- 02Final composite
- 03Logo on the ground
Real baked-in ads on the back banners + floor wordmark (Kia, YoPRO, Melbourne).
Final result, region by region
Top row = unmodified original broadcast (real baked-in ads, our quality bar). Bottom row = our composite.


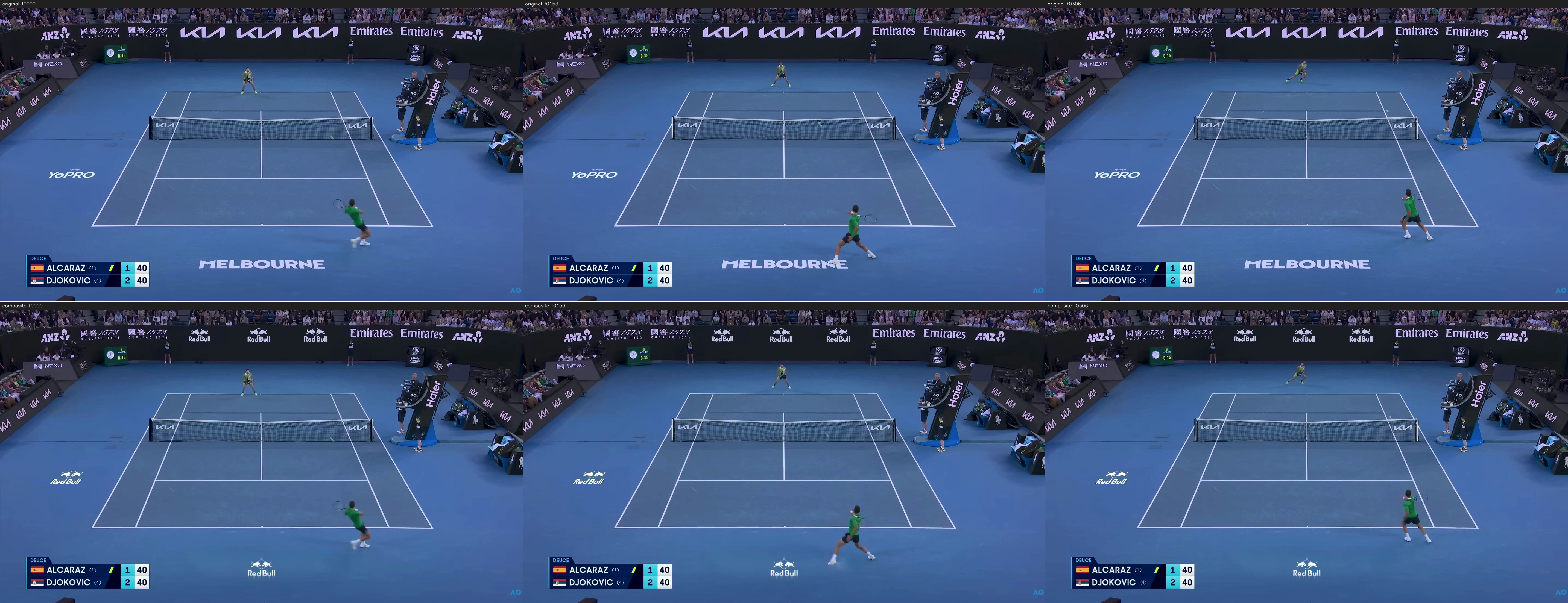
3 distinct back-wall banner positions, same frame (f0350). Temporal SSIM 0.9999 · jitter 0.291, visually identical to V68 gold.
Walkover sequence
Auto-detected walkover window: frames 685–723 · 5 key frames span entry → contact → exit





Demo
Video loops automatically. Use ← / → to step through.
Headline numbers
The final-run results in one screen, what the eval framework measured onexperiments/2026-05-05_18-38-39_hull_H200/.
one-liner
V68 manually-clicked corners + BallTrackerNet dynamic homography + hybrid_lock at 30-px tolerance + V68's LED-blend compositor, five placements, broadcast-stable, occluded correctly through a player walkover.
Evaluation, three layers
Every candidate gets scored at three layers before it can ship: deterministic numerical gates, a structured visual rubric, and direct side-by-side review against the original baked-in ads.
Numerical metrics
Per-region scorecards. Each region must pass all gated metrics; one warning-only set (ΔE, noise variance, edge sharpness) surfaces but doesn't gate.
- corner_max_jump_px< 2.0
- corner_accel_p95_px< 1.0
- quad_area_cv< 0.05
- roi_jitter_ratio≤ 1.05
- roi_temporal_ssim_mean> 0.95
- walkover_logo_visible_pct> 0.10
- walkover_occlusion_iou> 0.80
Exit code 0 = pass · 2 = scorecard fail · 3 = regression vs gold reference
Visual rubric
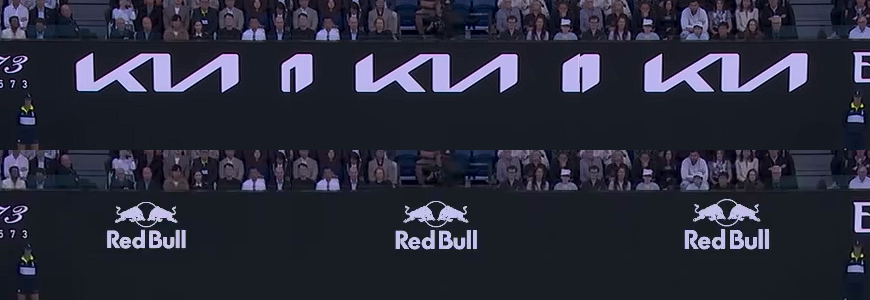
Per-region 1–5 score across 13 dimensions. Inputs are paired top=original / bottom=composite crop strips so the original baked-in ad is always the comparison anchor.
- painted_on vs pasted_on
- edge_seam_visibility
- texture_match
- halo_presence
- edge_reflex
- hue_match
- brightness_match
- saturation_match
- perspective_plausibility
- size_plausibility
- occlusion_realism
- jitter_visible
- player_contact_shadow
Direct visual review
finalHuman review of the actual output video against the original broadcast. The accept/reject vote; tie-breaks the numerical and rubric layers when they disagree.
example tie-break
A rubric-favorite candidate (layered shadow synthesis + aggressive erase_text + tight banner padding) scored 5/5 on the v2 user-flagged dimensionsand passed every numerical gate.
On direct viewing: floor shadow read as blob, MELBOURNE wordmark erasure flattened the floor context, harder banner edges read as "pasted on".
→ Final pick: P3-A1, the simpler BTN port baseline, with V68's compositor unchanged.
takeaway
Numerical gates and the visual rubric are great regression detectors; the rubric is great for surfacing dimensions worth inspecting. But the final accept/reject decision needs a human looking at the actual video against the original broadcast, the metrics we ship are the ones we'd defend on screen, not just on paper.
Modal + Speed Benchmarking
Every experiment ran on Modal, a serverless GPU platform. Up to 10 concurrent GPUs let us run parallel waves of experiments, ~50 H200 runs across 14 waves of iteration in Phase 3. Configs are frozen per-run; outputs land in experiments/<timestamp>_<gpu>/.
Modal GPU matrix
$/hr- T416 GB$0.59
- L424 GB$0.80
- A10G24 GB$1.10
- L40S48 GB$1.95
- A10040 GB$2.10
- A100-80GB80 GB$2.50
- H10080 GB$3.95
- H200 (final)141 GB$4.54
- B200192 GB$6.25
Final run, P3-A1
Parallelism unlock
10 concurrent H200 slots let us launch 5–8 parallel runs per wave. Phase 3 ran ~50 runs in <14 hours wall clock, most of that budget went on per-cycle evaluation + visual review, not GPU inference itself.
Future Improvements
Texture-match ceiling
- Smoothed inpaint micro-grain visible vs gritty court paint at close zoom
- Needs real texture transfer (noise injection / GAN-based inpaint)
Adaptive vp_smoothing
- Code shipped (P3-A2) but the parameter sweep didn't conclude
- Motion-aware EMA could lift walkover-window stability further
Real-time performance
- End-to-end ~2.7 fps on H200 today
- Target 30 fps for broadcast-viable; needs model + pipeline optimisation
Refine pipeline for Automatic ROI detection
- Best prompt so far: "sponsor logo on fixed advertising board" (~3.95 fps on A100-80GB)
Camera cuts + zoom
- Detect angle transitions; reseed homography on cuts
- Validate on data/zoom-clip-melbourne.mov + multi-clip eval
Other sports
- Pipeline supports any clip via configs/eval/reference.yaml
- Generalize beyond tennis (football, basketball)